Das Projekt Monello BoatSpy III

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Der Einsatz dieser Boote erfolgte bei der Wasserschutzpolizei als Kontrollboot.
Im Winterbetrieb ist die Fahrt bei leichten Eisverhältnissen bei einer geschlossenen Eisdecke bis 3 cm Dicke und bei Scholleneis bis zu 10 cm Dicke möglich.
Länge : 12,40 m, Breite : 2,87 m, Tiefgang : 0,85 m
Maschine und Leistung: 6 VD 14,5-12-1 / mit 103 kW - H6 Diesel
Die heutige Nutzung des Bootes erfolgt als Motor-Yacht. Schiffseigner und Skipper ist der Rostocker, Herr Klaus Richter.
Da die Kontrollmöglichkeiten von Medien und Maschine auf dem Schiff sehr beschränkt waren, bestand der Wunsch des Eigners,
eine elektronische Überwachung mittels Bordcomputer zu installieren. Dieser Computer sollte gleichzeitig auch zur Navigation und Kommunikation genutzt werden.
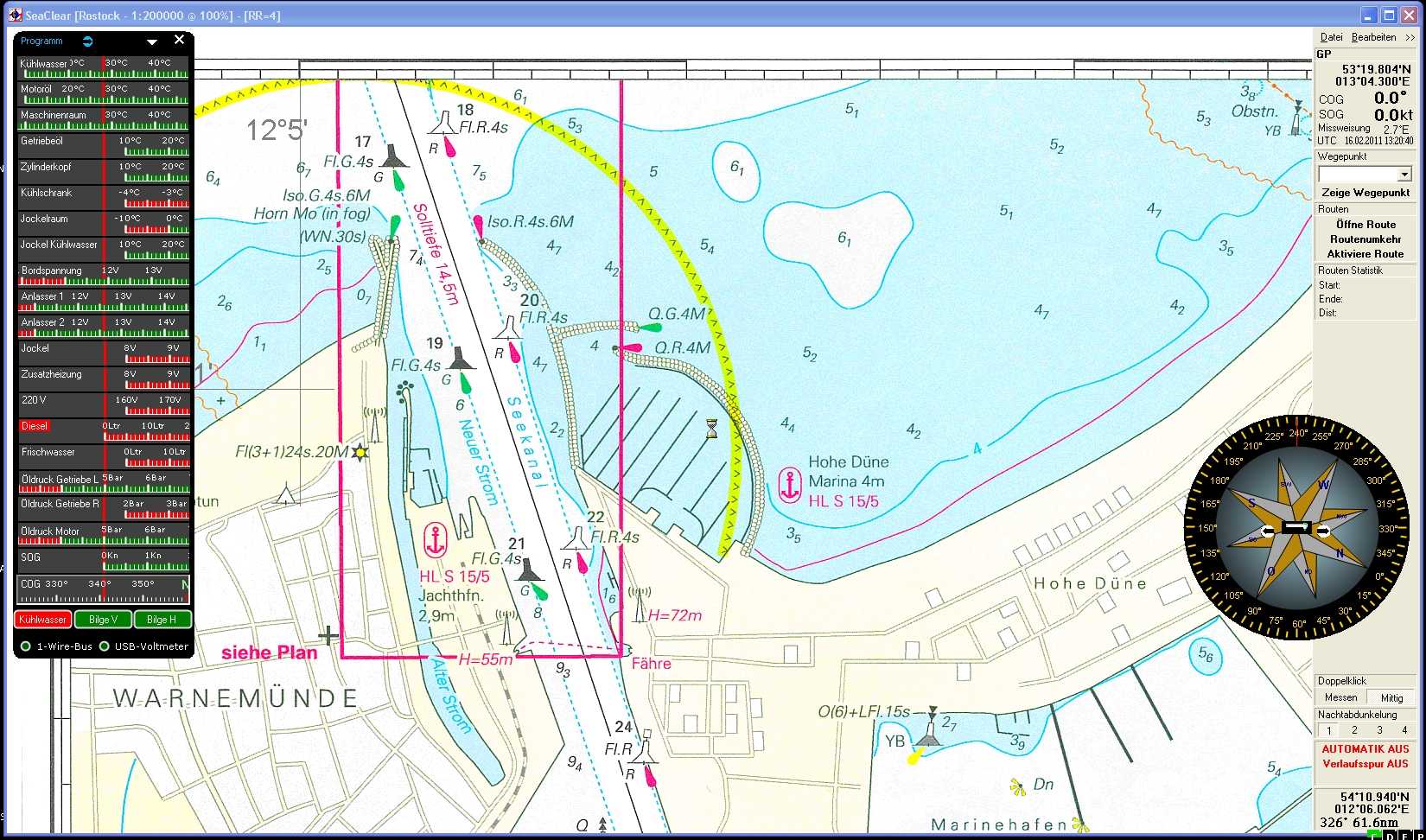
Die Darstellung der Meßwerte sollte auf dem Monitor in Form von Zeigerinstrumenten erfolgen.
Über folgende Funktionen sollte das neue System verfügen:
Temperaturmessungen:
Spannungsmessungen:
Druckmessungen:
|
Füllstände und Pegel:
Sonstiges:
|
Grundlagen BoatSpy III
Ein grundlegender Aspekt für die Planung des Projektes war die Frage der Kosten.
Es existieren käufliche Systeme auf Basis des NMEA-Busses, die jedoch wesentlich teurer als die hier vorgestellte Lösung sind.
Die Entscheidung fiel deshalb auf den Einsatz eines 1-Wire-Datenbusses, da die Firma Maxim hierfür preiswerte Sensoren und A/D-Wandler anbietet.
Folgende Hard- und Softwarekomponenten werden verwendet:
Hardware:
|
Software und Entwicklungstools:
Sonstiges:
|
Eine wichtige Rolle spielt der Energieverbrauch des Systems. Deshalb fiel die Wahl auf den genannten PC. Als Festplatte sollte wegen eventueller Schiffsvibrationen unbedingt eine SSD-HD zum Einsatz kommen.
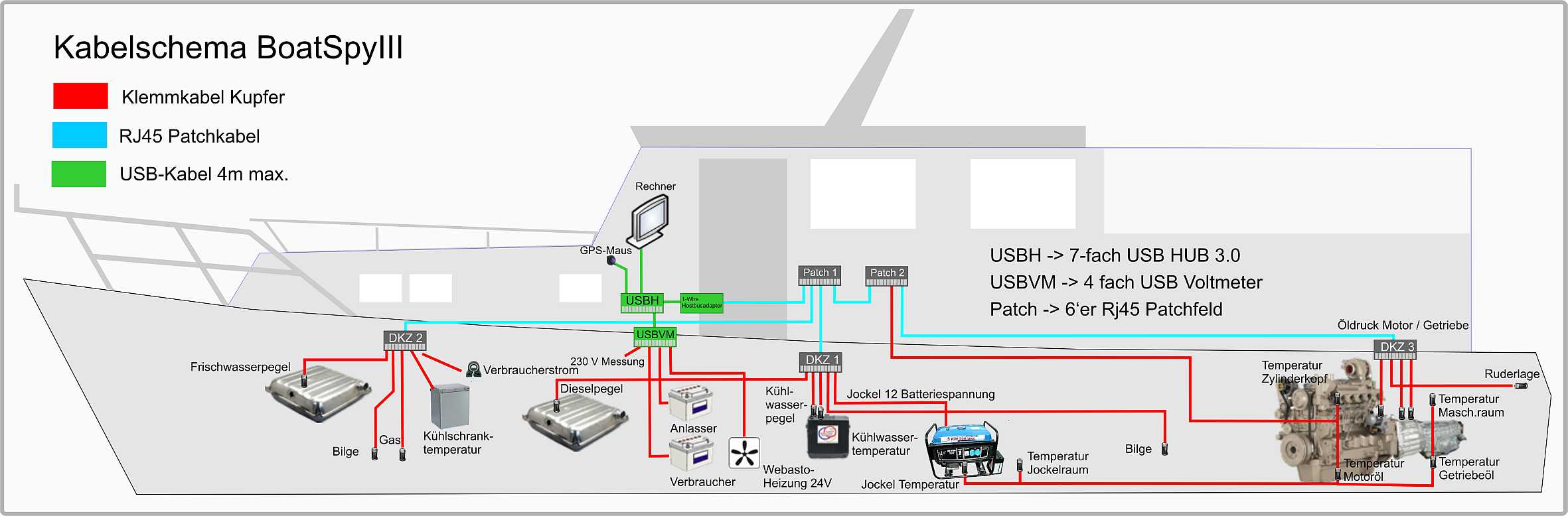
Das nachstehende Bild zeigt das globale Verdrahtungsschema:
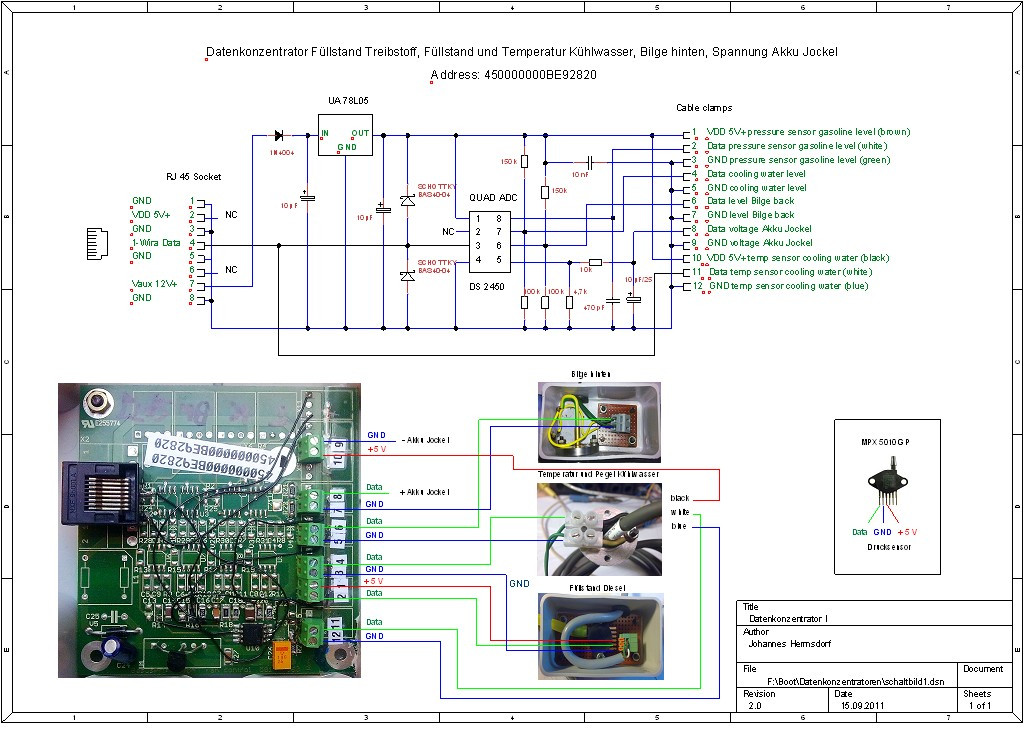
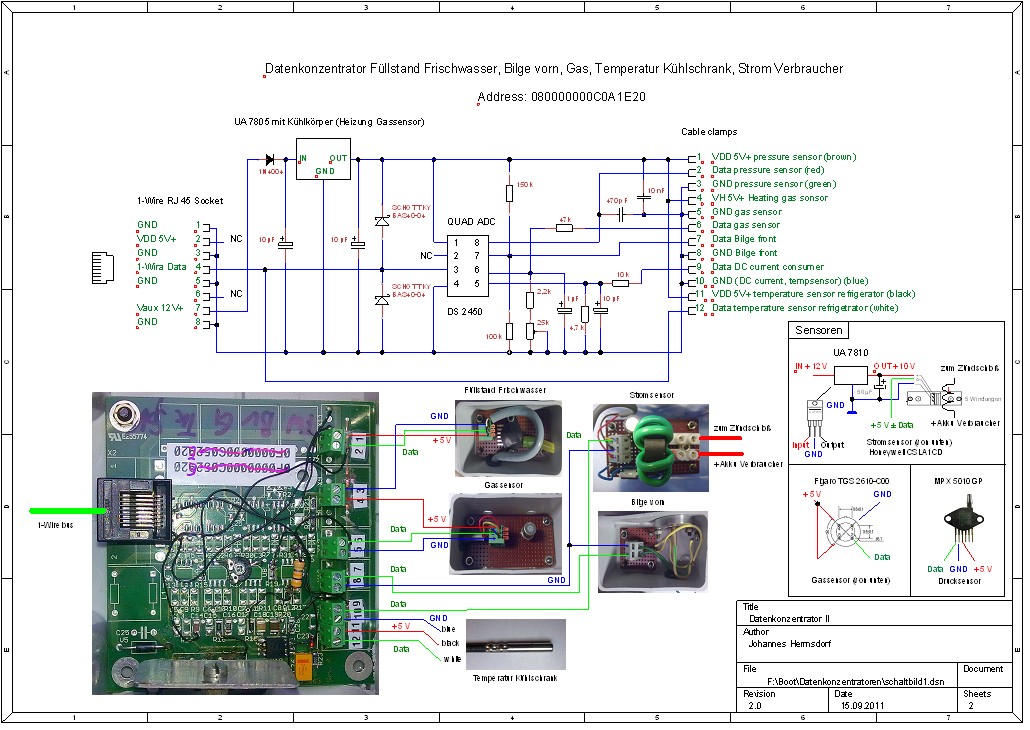
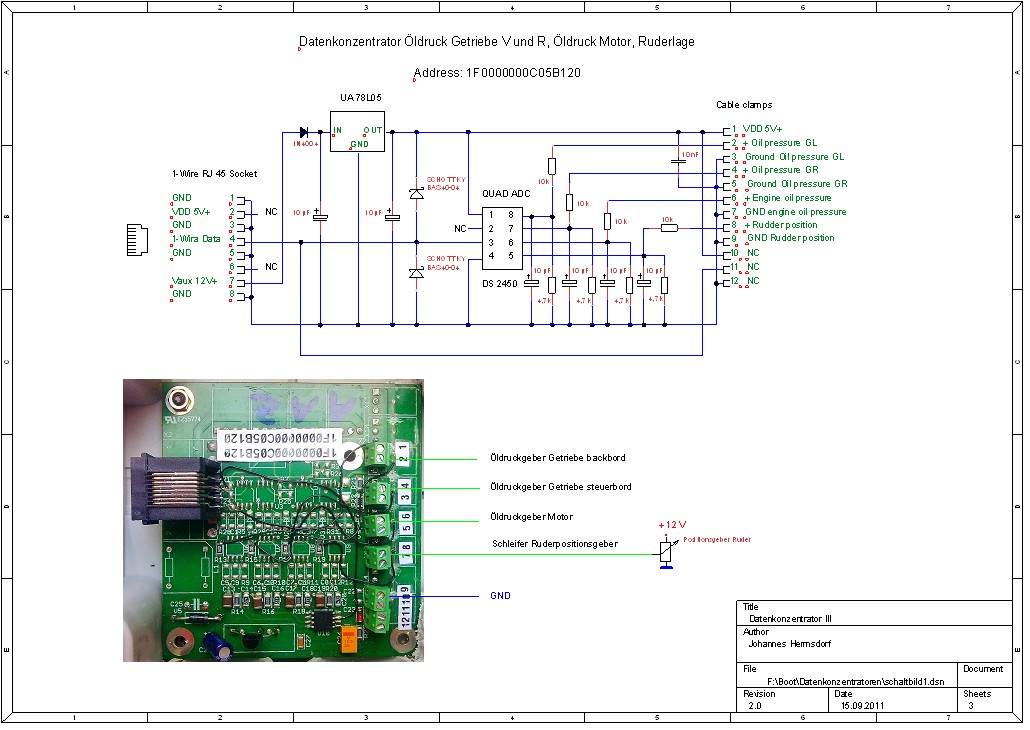
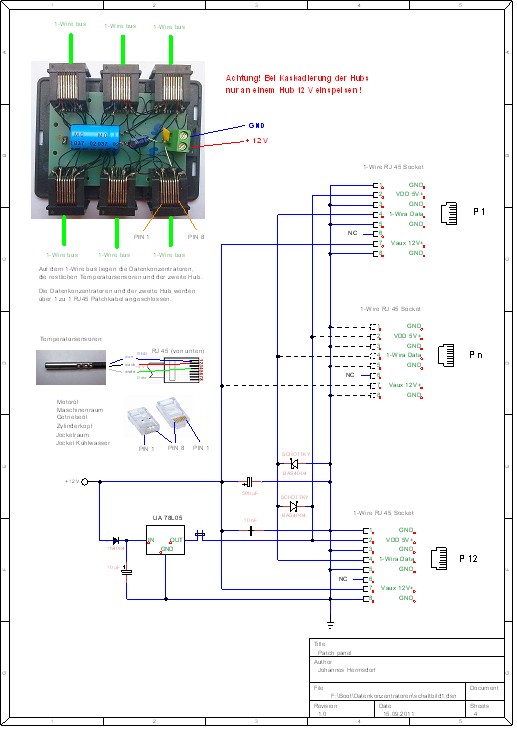
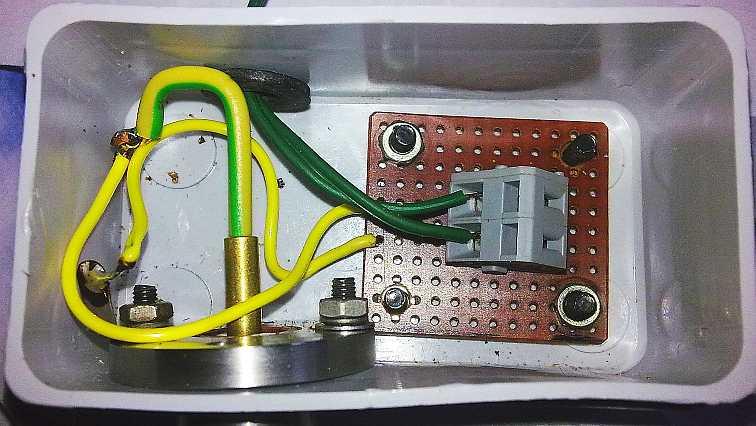
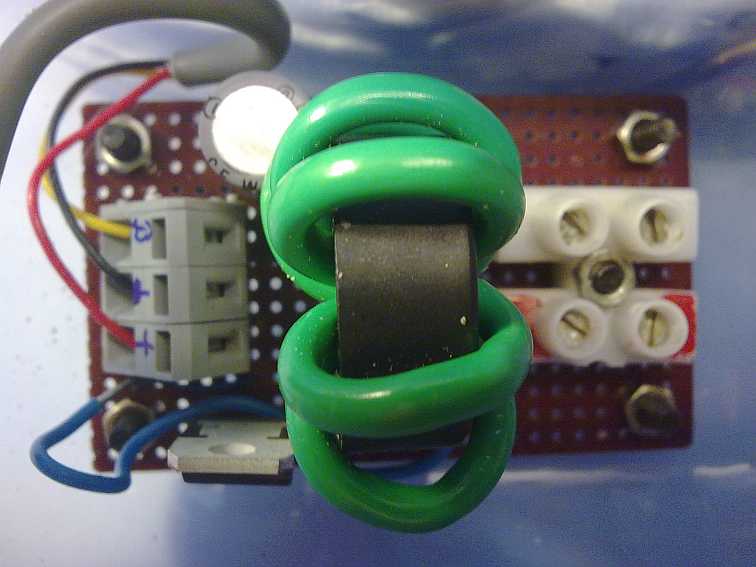
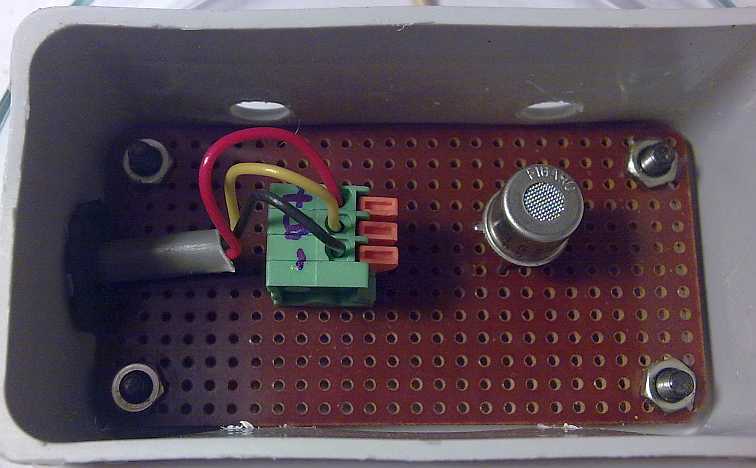
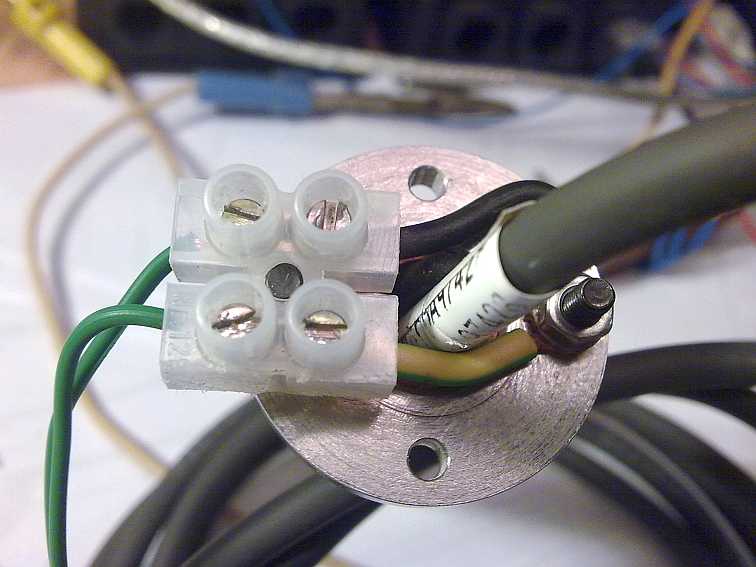
Schaltbilder und Sensoren
Die nachfolgenden Bilder zeigen die Schaltbilder des gesamten Projektes, inbesondere die Datenkonzentratoren und die Patchfelder für den 1-Wire-Bus und deren Verkabelung.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Software
Herzstück des Projektes ist die Software, die in Visual Basic geschrieben wurde. Sie besitzt nachfolgend genannte Eigenschaften:
- Betriebssysteme: Microsoft Windows XP, Microsoft Windows 7 (64- und 32 Bit)
- Normal und Kompaktansicht
- Akustische und optische Alarmierung bei kritischen Werten
- Akustische Alarmierung abschaltbar
- Kontinuierlich einstellbare Helligkeit
- Tag- und Nachtmodus
- Konfigurierbarkeit der Instrumente im Setup: Sensorzuordnung, Skalierung, Skalenfarbe, Hintergrundfarbe, Alarmauslösung
- Zeigerdämpfung der Instrumente
- Kompaßrose: Frei skalierbar in Position, Größe und Helligkeit
- Aktualisierungsintervall aller Werte: 0,5 Sekunden
- Administrationstool für das Setup
- Start- und Stop von Fremdprogrammen
- Automatische Umschaltung zwischen GPS- und Rechnerzeit
- 1-Wire-Bus-Monitoring
- USB-Voltmeter-Monitoring
- Anpassung an unterschiedlichste Anforderungen nach Bedarf